Đại lý Metrix Vibration Vietnam,Bảng chú giải độ rung Metrix Vibration Vietnam
Bảng chú giải độ rung Metrix Vibration Vietnam
Tín hiệu 4-20mA (Vòng lặp dòng điện 4-20mA): Vòng lặp dòng điện 4-20mA là một cách tiếp cận tín hiệu điện tử tương tự, trong đó thiết bị phát hai dây đặt dòng điện trong phạm vi từ 4 đến 20mA thành giá trị tỷ lệ với tín hiệu lãi. Được sử dụng rộng rãi trong các ứng dụng điều khiển công nghiệp, phương pháp này mang lại một lợi thế là độ chính xác không bị ảnh hưởng bởi sự sụt giảm điện áp do điện trở trong hệ thống dây dẫn. Ngoài ra, nó có thể cung cấp năng lượng hoạt động cho máy phát được kết nối. Để biết thêm thông tin, bấm vào đây.
Pha tuyệt đối: Mối quan hệ thời gian được đo bằng độ giữa điểm đánh dấu trục quay một lần theo sau là đỉnh rung đầu tiên của tín hiệu rung đã lọc. Góc giữa điểm đánh dấu trục quay một lần và đỉnh dương đầu tiên của tín hiệu rung đã lọc được đo trong khoảng 0 (0) và độ trễ 360 độ (độ trễ vì nó luôn được đo sau điểm đánh dấu một lần cho mỗi lần rẽ). Nó được gọi là “Tuyệt đối” bởi vì nó chỉ xảy ra khi điểm đánh dấu trục (đường then chốt hoặc hình chiếu) được căn chỉnh với đầu dò hoặc đầu thu (xem Thị trường mỗi lần một lượt bên dưới) theo sau là đỉnh dương trong tín hiệu rung được lọc.
Gia tốc kế: Một bộ chuyển đổi chuyển đổi gia tốc cơ học thành tín hiệu điện tử. Nó là một cảm biến địa chấn được làm từ vật liệu áp điện tạo ra điện tích đầu ra tỷ lệ với gia tốc (pC / g). Khi được đặt cùng với bộ khuếch đại điện tử và bộ chuyển đổi điện áp (mV / g), nó được gọi là gia tốc kế “khuếch đại bên trong”. Nếu do nhiệt độ, chỉ có cảm biến được gắn trên máy, thì thiết bị điện tử từ xa được gọi là “bộ khuếch đại điện tích” (mặc dù nó thường cũng chứa bộ chuyển đổi điện áp thành điện áp). Xem Gia tốc kế
Đáp ứng tần số của gia tốc kế: Đáp ứng tần số của gia tốc kế là một đặc điểm kỹ thuật của độ nhạy của gia tốc kế như một hàm của tần số.
Độ nhạy của máy đo gia tốc: Độ nhạy của máy đo gia tốc là một thông số kỹ thuật của tỷ lệ giữa đầu vào cơ học của máy đo gia tốc và đầu ra điện thường được chỉ định ở tần số tham chiếu 100 Hz hoặc, như trong trường hợp Đáp ứng tần số của máy đo gia tốc, như một hàm của một dải tần số.
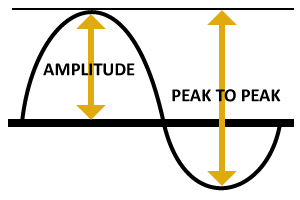
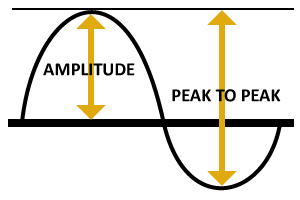
Biên độ: Biên độ là thước đo sự thay đổi của giá trị tín hiệu dưới dạng hàm Biên độ của thời gian. “Biên độ đỉnh-đến-đỉnh” đề cập đến sự thay đổi giữa các giá trị nhỏ nhất và lớn nhất của tín hiệu. “Biên độ RMS” đề cập đến biên độ trung bình gốc là căn bậc hai của giá trị trung bình của tín hiệu.Vị trí trục (Lực đẩy): Thay đổi vị trí (hoặc trung bình) của rôto theo hướng trục đối với kết cấu hỗ trợ chịu lực đẩy hoặc điểm cố định gần đó. Một đầu dò lân cận quan sát trục, vòng đệm của nó hoặc bề mặt trục tích hợp gần đó khác. Phép đo được thực hiện bằng khoảng cách khe hở đầu dò đã biết (điện áp) thể hiện vị trí đã biết của vòng đệm so với khe hở của ổ đỡ.
| 
|
Phần còn lại của nhà máy: Những máy không quan trọng đối với quy trình tổng thể của nhà máy. Chúng thường hoạt động song song hoặc lắp đặt riêng lẻ.
Cân bằng: Quy trình điều chỉnh sự phân bố khối lượng xuyên tâm của rôto sao cho đường tâm khối lượng (trục quán tính chính) tiếp cận trục quay của rôto. Điều này làm giảm độ rung hướng tâm của rôto do lực quán tính không cân bằng và lực tác dụng lên ổ trục ở tần số một lần mỗi vòng quay.
Hiệu chuẩn: Kiểm tra trong đó các giá trị đã biết của biến đo được áp dụng cho cảm biến, bộ điều hòa tín hiệu, màn hình hoặc toàn bộ số đọc đầu ra của kênh để xác minh hoặc điều chỉnh khi cần thiết.
Kênh: Một cảm biến với bộ điều hòa tín hiệu liên quan và phần cứng màn hình được yêu cầu để hiển thị tín hiệu đầu ra của nó.
Giám sát tình trạng: Một lĩnh vực rộng lớn của phép đo và phân tích các thông số máy móc để xác định tình trạng máy móc. Các chương trình giám sát tình trạng hiện đại bổ sung “giám sát bảo vệ” theo thời gian thực về rung động, nhiệt độ và quá trình với các công cụ phân tích bảo trì “dự đoán” dựa trên máy tính thường phức tạp hơn. Mục đích của họ là dự đoán thời gian có thể xảy ra hỏng hóc máy móc liên quan đến sản xuất theo lịch trình hơn là bảo trì “phòng ngừa” dựa trên khoảng thời gian không cần thiết. Các công cụ bổ sung có thể bao gồm thực hiện phân tích độ rung, phân tích dầu, căn chỉnh bằng laser và cân bằng tự động. Việc sử dụng nhiệt kế để truyền nhiệt không mong muốn do khớp nối sai khớp nối, các vấn đề về quy trình hoặc kết nối điện và việc theo dõi các thay đổi âm thanh trong một số van và vòng bi phần tử lăn cũng được sử dụng.
Máy móc thiết yếu: Máy móc thiết yếu là những máy cần thiết cho một bộ phận chính của nhà máy. Khi chúng đi xuống, phần đó của quy trình không thể hoạt động. Chúng thường không được chuẩn bị và theo dõi liên tục.
Độ nhạy Trục chéo (Ngang): Tỷ lệ giữa sự thay đổi đầu ra tín hiệu của cảm biến địa chấn với sự thay đổi gia tăng đối với kích thích dọc theo bất kỳ trục nào vuông góc với trục nhạy.
Nhiễu xuyên âm: Nhiễu hoặc nhiễu trong cảm biến hoặc kênh có nguồn gốc từ cảm biến hoặc kênh khác. Nó có thể xảy ra khi hai (hoặc nhiều) đầu dò gần nhau quá gần nhau, dẫn đến sự tương tác của điện từ trường của chúng. Kết quả là có một thành phần tín hiệu trên mỗi tín hiệu đầu ra của cảm biến. Tần số của tiếng ồn là sự khác biệt (tần số nhịp) của hai tần số dao động của trình điều khiển đầu dò.
Hệ thống tiệm cận kỹ thuật số: DPS bao gồm một đầu dò tiệm cận, một cáp mở rộng và một bộ điều hòa tín hiệu. Hai mẫu có sẵn cho bộ điều hòa tín hiệu tùy thuộc vào định dạng đầu ra tín hiệu được yêu cầu: Bộ điều khiển 3 dây MX2033 và Bộ phát MX2034 4-20 mA. Bạn có thể cấu hình lại các thiết bị linh hoạt này để xử lý nhiều loại đầu dò và kết hợp cáp từ Metrix cũng như Bently Nevada và các đối thủ cạnh tranh khác. Tim hiểu thêm ở đây.
Độ dịch chuyển: Sự thay đổi về khoảng cách hoặc vị trí của một đối tượng. Nó thường là phép đo độ rung từ đỉnh đến đỉnh với đơn vị mils hoặc micromet. Trong giám sát lân cận, các đầu dò lân cận dòng điện xoáy đo trực tiếp dịch chuyển trục. Trong quan trắc địa chấn, cần phải tích hợp tín hiệu cảm biến vận tốc để thu được dịch chuyển. Tín hiệu gia tốc yêu cầu tích hợp kép (hai giai đoạn) để mang lại phép đo dịch chuyển.
Đường dẫn kép: Kỹ thuật được sử dụng trong bộ điều hòa tín hiệu và / hoặc màn hình theo đó một đầu vào cảm biến duy nhất được xử lý thông qua hai đường dẫn riêng biệt; mỗi đơn vị đo lường riêng (ví dụ: vận tốc và độ dịch chuyển), lọc tùy chọn, điểm đặt và hiển thị đọc.
Biểu quyết kép: Một khái niệm yêu cầu hai đầu vào độc lập đồng ý trước khi hành động được thực hiện. Chức năng này có thể được tích hợp trong màn hình, theo đó hai tín hiệu đầu vào cảm biến (so với chỉ một) cả hai đều phải đo giá trị biên độ vượt quá một điểm đặt (thường chỉ là điểm đặt Nguy hiểm) trước khi điều kiện cảnh báo được chỉ ra.
Chuyển động động: Rung động của hệ thống rôto.
Dòng điện xoáy: Dòng điện được tạo ra (và tiêu tán) trong vật liệu dẫn điện (thường là trục rôto) khi nó chặn từ trường điện của một đầu dò gần.
Lệch Điện: Một nguồn lỗi tín hiệu từ hệ thống cảm biến tiệm cận lặp lại với mỗi vòng quay trục; Sự thay đổi tín hiệu đầu ra của trình điều khiển đầu dò không do thay đổi khoảng cách đầu dò (chuyển động động hoặc thay đổi vị trí); Thường gây ra bởi độ dẫn điện khác nhau của vật liệu trục hoặc sự hiện diện của từ trường cục bộ tại (các) điểm trên bề mặt trục.
Công tắc rung điện tử: Hợp nhất một máy đo gia tốc, bộ điều hòa tín hiệu và màn hình (tức là một kênh giám sát địa chấn duy nhất). Cung cấp (các) độ trễ thời gian điểm đặt để tránh sai chuyến đi và đo vận tốc (hoặc độ dịch chuyển) nhạy hơn. Hầu hết đều có điểm đặt thứ hai tùy chọn. Xem Công tắc rung điện tử.Lỗi: Sự khác biệt giữa giá trị được chỉ ra và giá trị thực của biến được đo. Thông thường được biểu thị bằng lỗi tương đối, là phần trăm số đọc đầu ra của cảm biến.
|
|
Máy móc thiết yếu: Sau đó là một thiết bị quan trọng cho một phần của nhà máy. Khi ngừng hoạt động, tổng thể nhà máy không thể hoạt động hết công suất. Chúng có thể được tha hoặc không bị nhiễm và thường được theo dõi liên tục.
Cáp mở rộng: Cáp đồng trục được sử dụng để kết nối cáp của đầu dò gần với trình điều khiển của đầu dò. Nó phục vụ 1) mở rộng khoảng cách đến vị trí thích hợp cho trình điều khiển đầu dò và 2) cung cấp điểm ngắt kết nối để dễ dàng lắp đặt và loại bỏ kiểu lắp tiêu chuẩn, đầu dò lân cận có ren. Xem thêm Độ dài hệ thống.
Bộ lọc: Có thể triển khai kỹ thuật số trong phần mềm hoặc với mạch tương tự, bộ lọc là các phần tử vượt qua hoặc loại bỏ một dải tần số thường để cô lập (các) điều kiện cơ học của máy móc cụ thể. Bộ lọc “thông cao” chỉ cho phép các tần số cao hơn tần số thiết kế của chúng đi qua (tức là được phát hiện). Các bộ lọc “Đạt thấp” chỉ cho phép các bộ lọc thấp hơn. “Bộ lọc thông dải” là cả dải tần thấp và cao để thu hẹp cả hai đầu của dải đáp ứng tần số tiêu chuẩn. Ở tần số thiết kế của bộ lọc, độ suy giảm tín hiệu biên độ thường là -3 dB và sau đó giảm dần (suy giảm thêm) vượt ra ngoài “tốc độ cuộn” thiết kế.
Dao động cưỡng bức: Dao động cưỡng bức là dao động của hệ dưới tác dụng của cơ năng thường xảy ra với tần số của lực kích thích.
Rung tự do: Rung của một hệ thống cơ học theo một sự xáo trộn ban đầu (thay đổi vị trí hoặc vận tốc). Tùy thuộc vào loại nhiễu loạn, hệ thống phản ứng bằng rung động tự do ở một hoặc nhiều tần số tự nhiên của nó.
Tần số: Tốc độ lặp lại của một dao động tuần hoàn trong một đơn vị thời gian. Thường được biểu thị bằng đơn vị chu kỳ trên phút (cpm) hoặc chu kỳ trên giây (cps hoặc Hz) và có thể được biểu thị tương ứng với RPM của trục. Đối với rung động của máy móc đang quay, có hai loại tần số được quan tâm: 1) tần số quay của trục (RPM) và 2) các tần số rung khác nhau được đo bằng cảm biến rung. Tần số rung thường được biểu thị bằng một phần hoặc phần trăm RPM của trục: 1X nghĩa là một lần RPM, 2X nghĩa là hai lần, 1 / 2X, nghĩa là 50%, v.v.
Đáp tuyến tần số: Là đặc tính pha và biên độ đo được của hệ thống cơ học hoặc điện tử liên quan đến tần số.
g: kí tự”Nhỏ” g là giá trị của gia tốc tạo ra bởi lực hấp dẫn của Trái đất, thay đổi phần nào theo vĩ độ và độ cao của điểm quan sát. Giá trị 9,81 m / s2 = 386 in / s2 = 32,2 ft / s2 được sử dụng cho gia tốc do trọng lực ở mực nước biển. Để biết thêm thông tin, bấm vào đây.
Tần số lưới bánh răng: Tần số rung có thể xảy ra trên bất kỳ máy nào sử dụng bánh răng. Nó được tính bằng cách nhân số răng bánh răng với RPM của trục bánh răng đó. Đối với một bộ bánh răng nhất định, tất cả các bánh răng tiếp xúc đều có cùng tần số lưới bánh răng để hoạt động bình thường, nếu không chúng sẽ không lưới và sớm hỏng.
Sóng hài: Đại lượng hình sin ở tần số là bội số nguyên của tần số cơ bản.
Hertz (Hz): Đơn vị tần số tính bằng chu kỳ / giây. Chia RPM của trục cho 60 cho tần số tính bằng Hz.
Độ trễ (Deadband): Tính không duy nhất giữa hai biến khi một tham số tăng hoặc giảm. Cụ thể, sự khác biệt lớn nhất về đầu ra tại bất kỳ giá trị nhất định nào của biến đo được trong phạm vi xác định, khi giá trị này lần đầu tiên được tiếp cận với tín hiệu tăng và sau đó là tín hiệu giảm. Còn được gọi là dải chết, hoặc phần phản hồi của hệ thống trong đó thay đổi đầu vào không tạo ra thay đổi đầu ra.
Tham chiếu quán tính: Chuyển động được quy chiếu theo quán tính được tham chiếu tới không gian trống hoặc đến một điểm cố định trong không gian; một cảm biến đo chuyển động đó.
Bộ tích hợp: Mạch được sử dụng trong bộ điều hòa tín hiệu địa chấn và / hoặc màn hình thực hiện tích hợp toán học. Nó chuyển đổi tín hiệu vận tốc thành độ dịch chuyển hoặc tín hiệu gia tốc thành vận tốc. Bộ tích phân kép chuyển đổi tín hiệu gia tốc thành độ dịch chuyển.
Độ tuyến tính: Độ gần của đường chuẩn với một đường thẳng cụ thể, được biểu thị bằng độ lệch lớn nhất của bất kỳ điểm hiệu chuẩn nào đối với đường đó trong bất kỳ lần tăng hiệu chuẩn nào.
Lỗi cơ học: Lỗi đầu ra tín hiệu của hệ thống cảm biến tiệm cận; sự thay đổi khe hở đầu dò không do thay đổi vị trí tâm trục hoặc chuyển động động. Các nguồn phổ biến bao gồm trục không tròn, vết xước, vết xích, vết lõm, rỉ sét, vết bút chì, vết đốm và vết khắc.
Công tắc rung cơ học: Thiết bị có thể đặt lại, sau khi quan sát thấy rung động cưỡng bức lớn hơn điểm đặt của nó, tăng tốc một khối lượng (ví dụ như một đòn bẩy) để bắt đầu đóng hoặc mở một bộ tiếp điểm trường bên trong. Xem Công tắc rung cơ học.Micron (Micromet): Chiều dài hoặc độ dịch chuyển bằng 10 ^ -6 mét. Một micrômet tương đương với 0,04 triệu.
|
|
Màn hình: Một thuật ngữ thiết bị đo đạc được sử dụng lỏng lẻo. Đối với máy móc, màn hình “bảo vệ” có thể chấp nhận đầu vào từ nhiều loại cảm biến bao gồm nhiệt độ, độ rung, RPM và loại đầu ra 4 – 20 mA. Ở mức tối thiểu, màn hình so sánh các giá trị đo được theo thời gian thực (sau bất kỳ điều chỉnh tín hiệu nào) với (các) điểm đặt cảnh báo, tính toàn vẹn của cảm biến / dây đầu vào khác nhau và cung cấp đầu ra rơle cho máy móc CẢNH BÁO và / hoặc cảnh báo NGUY HIỂM. Khi các đầu vào màn hình được chấp nhận bao gồm các cảm biến rung động truyền thống với đầu ra động yêu cầu màn hình cũng phải điều hòa tín hiệu bên trong, thì nó được gọi là màn hình “đầu vào rung”. Khi một màn hình chỉ chấp nhận đầu vào 4-20 mA từ bộ truyền rung động (chẳng hạn như PLC, DCS hoặc các sản phẩm Metrix nhất định), màn hình thường được gọi là màn hình “đầu vào 4-20 mA”.
Nhiễu: Bất kỳ thành phần nào của tín hiệu đầu ra cảm biến không đại diện cho biến dự kiến đo.
Điểm đánh dấu một lần cho mỗi lần rẽ: nếu sử dụng Đầu dò tiệm cận, nó được gọi là Bộ kích hoạt pha (BN sử dụng từ Bàn phím do thực tế là đầu dò lân cận thường sử dụng một rãnh then để tạo xung một lần mỗi lượt). Bạn cũng có thể sử dụng bộ thu từ tính hoặc bộ thu quang để tạo tín hiệu cần thiết cho điểm đánh dấu trục quay một lần.
Giá trị đỉnh-đến-đỉnh: Sự khác biệt giữa các giá trị cực dương và âm của tín hiệu hoặc chuyển động động. Xem Biên độ.
Rung động tuần hoàn: Chuyển động dao động có dạng biên độ lặp lại theo thời gian.
Pha: Phép đo mối quan hệ thời gian giữa hai tín hiệu hoặc giữa một tín hiệu rung cụ thể và sự kiện cách mạng một lần (góc pha).
Đầu dò tham chiếu pha: Một đầu dò được sử dụng để 1) xác định vị trí không cân bằng (góc pha) so với vị trí đo sự kiện quay vòng một lần trên mỗi trục (ví dụ: rãnh then hoặc băng phản chiếu); 2) đối với các phép đo cộng hoặc trừ véc tơ dao động phức tạp. Cảm biến được sử dụng trong các phép đo tham chiếu pha với màn hình “bảo vệ” được lắp đặt thường là hệ thống cảm biến tiệm cận trên một rãnh then. Máy không được bảo vệ, hoặc máy không có đầu dò chuẩn pha cố định, có thể được thêm băng phản xạ tạm thời để cảm biến quang quan sát được.
Piezoelectronic: Bất kỳ vật liệu nào cung cấp sự chuyển đổi từ năng lượng cơ sang năng lượng điện. Đối với một tinh thể áp điện, nếu ứng suất cơ học được đặt lên hai mặt đối diện thì các điện tích xuất hiện trên một cặp mặt khác.
Đầu dò: Thuật ngữ được sử dụng rộng rãi cho bất kỳ thiết bị được gắn trên máy nào bao gồm cảm biến rung. Xem Đầu dò.
Giám sát tiệm cận: Một hoặc nhiều kênh giám sát mỗi kênh bao gồm: 1) hệ thống cảm biến tiệm cận; 2) bộ điều hòa tín hiệu; 3) màn hình. Đối với một ứng dụng nhất định, các thành phần giám sát này có thể được kết hợp một phần (ví dụ: trình điều khiển đầu dò và bộ điều hòa tín hiệu để tạo thành bộ truyền rung động đơn nhất) hoặc hoàn toàn thành một công tắc lân cận có đầu ra rơ le.
Đầu dò tiệm cận: Một thiết bị không tiếp xúc, đo chuyển động dịch chuyển và vị trí của bề mặt được quan sát so với vị trí lắp đầu dò. Các đầu dò tiệm cận được sử dụng để đo máy móc quay thường hoạt động trên nguyên tắc dòng điện xoáy và đo chuyển động dịch chuyển trục và vị trí so với (các) ổ trục hoặc vỏ máy.
Trình điều khiển đầu dò tiệm cận (Bộ tạo dao động-Bộ điều chế): Một thiết bị gửi tín hiệu tần số vô tuyến đến đầu dò lân cận dòng điện xoáy thường thông qua cáp mở rộng, giải điều chế đầu ra của đầu dò và cung cấp tín hiệu đầu ra tỷ lệ với cả khoảng cách khoảng cách đầu dò trung bình và động.
Khoảng cách đầu dò tiệm cận: Khoảng cách vật lý tính bằng micromet hoặc mils giữa mục tiêu (ví dụ: trục máy móc hoặc mục tiêu hiệu chuẩn cảm biến tiệm cận) và đầu dò khoảng cách. Phép đo được thực hiện bằng cơ học với máy đo độ dày hoặc máy đo độ dày hoặc phổ biến hơn là do các hạn chế về truy cập trường hợp máy móc, bằng điện bằng cách đọc tín hiệu điện áp đầu ra DC từ hệ thống cảm biến tiệm cận được cấp nguồn. Đặt khe hở đầu dò đề cập đến việc định vị tĩnh (tức là tắt máy) của đầu dò đến một khoảng cách từ trục ở trung tâm phạm vi tuyến tính của hệ thống cảm biến. Điều này cho phép đo điện tử tuyến tính của một chuyển động (tức là trên máy) phát sinh từ rung động xuyên tâm hoặc thay đổi vị trí trục của khoảng cách đầu dò tĩnh này với điều kiện nó không vượt quá phạm vi tuyến tính tối đa của hệ thống cảm biến theo một trong hai hướng.
Định hướng đầu dò tiệm cận: Vị trí góc của đầu dò tiệm cận đối với hệ tọa độ cực khi được nhìn từ đầu trình điều khiển của máy. Thông thường, 0 độ nằm ở tâm trên cùng (thẳng đứng) hoặc ở vị trí nằm ngang bên phải (3 o’clock) trên hệ tọa độ.
Bộ hiệu chỉnh cảm biến tiệm cận: Một thiết bị cơ học tạo ra chuyển động động của bề mặt quan sát ở biên độ và tần số đã biết. Bề mặt được quan sát bởi một đầu dò tiệm cận chỉ nhằm mục đích hiệu chỉnh hệ thống cảm biến tiệm cận hoặc với màn hình của nó, toàn bộ kênh tiệm cận.
Hệ thống cảm biến tiệm cận: Hệ thống cảm biến được kết hợp bằng điện (được điều chỉnh) bao gồm một đầu dò khoảng cách, thường là một cáp kéo dài và một trình điều khiển đầu dò.
Hướng tâm: Hướng của máy vuông góc với đường tâm trục; trong mặt phẳng XY; thường đề cập đến hướng chuyển động hoặc phép đo của trục hoặc vỏ.
Radial (Centerline) Vị trí: Vị trí trung bình của đường tâm trục trong ổ trục. Điều này có thể được đo bằng cách ghi nhận sự thay đổi trong đầu ra VDC của hai đầu dò XY từ một vị trí đã biết với trục ở trạng thái nghỉ. Các đầu dò XY nên được gắn vào ổ trục hoặc vỏ của nó để loại bỏ các lỗi phát triển nhiệt.
Vị trí hướng tâm (Bên): Chuyển động động của trục hoặc độ rung của vỏ được đo ở 90o so với đường tâm trục.
Rung chuyển động tương đối: được đo so với tham chiếu đã chọn. Đầu dò tiệm cận đo chuyển động động của trục và vị trí liên quan đến việc lắp đầu dò, thường là ổ trục hoặc vỏ ổ trục.
Giai đoạn tương đối: Mối quan hệ thời gian được đo bằng độ giữa hai tín hiệu giống như rung động (vận tốc với vận tốc, gia tốc với gia tốc, chuyển vị thành độ dời – không phải vận tốc với độ dịch chuyển hoặc gia tốc với vận tốc) được đo giữa không (0) và 180 độ dẫn hoặc trễ.
Đầu dò tương đối: Một đầu dò gần quan sát chuyển động của trục so với tham chiếu tĩnh như vỏ ổ trục.
Khả năng lặp lại: Khả năng của cảm biến hoặc màn hình tái tạo các số đọc đầu ra khi áp dụng cùng một giá trị vào nó nhiều lần, trong cùng điều kiện và theo cùng một hướng. Cũng là độ lệch lớn nhất so với giá trị trung bình của các điểm dữ liệu tương ứng được lấy từ các thử nghiệm lặp lại trong các điều kiện giống hệt nhau.
Bộ phát hiện nhiệt độ điện trở (RTD): Một cảm biến đo nhiệt độ hoặc sự thay đổi nhiệt độ như một chức năng của điện trở.
Độ phân giải: Sự thay đổi nhỏ nhất trong kích thích được áp dụng sẽ tạo ra sự thay đổi có thể phát hiện được trong sản lượng thiết bị. Độ phân giải khác với độ chính xác ở chỗ nó là một thuật ngữ tâm lý-vật lý đề cập đến mức tăng nhỏ nhất của đầu ra mà con người cảm nhận được (được đánh giá theo mức tăng tương ứng của đầu vào).
Cộng hưởng: Điều kiện mà tần số cưỡng bức trùng với tần số riêng của hệ thống. Một điều kiện cộng hưởng thường làm tăng biên độ đáng kể.
RMS (ROOT MEAN SQUARE): Căn bậc hai của trung bình cộng của một tập hợp các giá trị tức thời bình phương. Trong ổ trục phần tử lăn, các vấn đề ổ trục nhất định có thể được chỉ ra bởi mức độ rung RMS tăng lên của chuyển động vòng ngoài. Xem Biên độ.
Vòng bi phần tử lăn: Vòng bi sử dụng các phần tử lăn (con lăn hoặc bi) để hỗ trợ tải trọng của trục quay với ma sát tối thiểu. Ryton: Một loại polymer có khả năng chống mài mòn và hóa học cao (nhựa polyphenylene sulfide) được sản xuất bởi Công ty Dầu khí Chevron Phillips được sử dụng để chế tạo các đầu dò gần. Để biết thêm thông tin, bấm vào đây.
|
|
Giám sát địa chấn: Một hoặc nhiều kênh giám sát, mỗi kênh bao gồm: 1) cảm biến gia tốc (vỏ) địa chấn hoặc cảm biến vận tốc; 2) bộ điều hòa tín hiệu; 3) màn hình. Đối với một ứng dụng nhất định, các thành phần giám sát này có thể được kết hợp một phần (ví dụ như một máy đo gia tốc và một bộ điều hòa tín hiệu để tạo thành một máy phát rung động duy nhất) hoặc hoàn toàn thành một công tắc rung điện tử có đầu ra rơ le.
Cảm biến: Một thiết bị để dịch độ lớn của đại lượng này sang đại lượng khác. Đại lượng thứ hai thường có các đơn vị đo lường khác nhau và phục vụ để cung cấp một tín hiệu hữu ích hơn. Cảm biến rung chuyển chuyển động cơ học thành tín hiệu điện tử (thường là tín hiệu tỷ lệ điện áp). Xem cảm biến.
Hệ số đặt điểm (Chuyến đi): Một chức năng được cung cấp trong hệ thống giám sát để tạm thời tăng giá trị điểm đặt cảnh báo (Cảnh báo và Nguy hiểm) lên một bội số cụ thể (thường là hai hoặc ba). Chức năng này có thể được áp dụng bằng tay hoặc tác động của rơle điều khiển trong quá trình khởi động để cho phép máy đi qua dải tốc độ rung cao mà không có chỉ báo cảnh báo màn hình quá mức. Phạm vi tốc độ như vậy có thể bao gồm cộng hưởng hệ thống và các rung động thoáng qua bình thường khác.
Điểm đặt: Ngưỡng có thể điều chỉnh trên đó giá trị đo được sẽ bắt đầu đầu ra rơle cho biết máy hoặc quá trình Cảnh báo và / hoặc tình trạng Cảnh báo nguy hiểm.
Suy giảm tín hiệu: Sự giảm độ lớn của tín hiệu mà không làm thay đổi các đặc tính cơ bản của tín hiệu. Ngoài ra, mức giảm điện áp được sử dụng để giảm tín hiệu điện tử lớn xuống độ lệch toàn bộ trên các thiết bị như máy ghi âm. Số không thứ nguyên này thường ở các bước chẵn 0,5, 0,2 và 0,1 Sự suy giảm tín hiệu cũng có thể do giảm sự truyền rung cơ học từ bộ phận máy này sang bộ phận máy khác (ví dụ: trục đến vỏ ổ trục) và cũng từ mạch điều hòa tín hiệu trong một số ứng dụng .
Bộ điều chỉnh tín hiệu: Một thiết bị được đặt giữa nguồn tín hiệu (cảm biến) và màn hình để thay đổi tín hiệu. Ví dụ: bộ suy hao, bộ khuếch đại, bộ chuyển đổi tín hiệu (để thay đổi một đại lượng điện thành đại lượng khác như vôn thành ampe, tương tự thành kỹ thuật số, bộ tích hợp) và bộ lọc.
Độ lợi tín hiệu: Sự thay đổi độ lớn của tín hiệu. Ngoài ra, bộ khuếch đại điện áp được sử dụng để phóng to các tín hiệu điện tử nhỏ lên đến độ lệch toàn bộ trên các thiết bị. Thường được thể hiện ở các bước 2, 5 và 10.
Độ dốc trượt tuyết: Tầng tiếng ồn trên cao giảm khi tần số tăng lên, thường áp đảo các đỉnh ở tần số rời rạc có trong các phép đo thông thường.
Spall: Một mảnh hoặc phoi kim loại được lấy ra từ một trong các rãnh từ bộ phận cán của ổ trục. Spalling là bằng chứng của sự xuống cấp nghiêm trọng của ổ trục và có thể được phát hiện bởi sự gia tăng tương đối nhỏ của biên độ tín hiệu ở tần số ổ trục trong quá trình hoạt động.
Chiều dài hệ thống: Một tính năng của hệ thống cảm biến tiệm cận có độ lớn bằng với độ dài điện kết hợp của đầu dò tiệm cận và (thông thường) cáp mở rộng được khớp (điều chỉnh) với thiết bị điện tử điều khiển đầu dò tiệm cận để có chức năng thích hợp (tuyến tính). Các hệ thống cảm biến tiệm cận mới hơn thường có chiều dài hệ thống 5 hoặc 9 m thường nằm trong +/- 5% chiều dài kích thước của chúng. Một số hệ thống cũ hơn có chiều dài hệ thống 15 hoặc 20 feet và đối với đầu dò đường kính nhỏ, có chiều dài kích thước ngắn hơn tới -15%
Thermistor: Một thiết bị điện dùng để đo nhiệt độ. Hệ số điện trở của chúng là dương hoặc âm (tức là khi nhiệt độ tăng, điện trở có thể tăng hoặc giảm đối với một loại nhất định).
Cặp nhiệt điện: Một thiết bị cảm biến nhiệt độ bao gồm hai dây kim loại khác nhau mà khi bị tác động nhiệt (làm nóng hoặc nguội) sẽ tạo ra sự thay đổi tỷ lệ thuận trong điện thế tại điểm chúng nối với nhau.
Ngưỡng: Thay đổi nhỏ nhất trong biến đo lường sẽ dẫn đến thay đổi có thể đo lường trong tín hiệu đầu ra.
Thời gian trễ: Các hệ thống chống rung điện tử thường cung cấp hai loại để tránh cảnh báo giả cho các điều kiện nhất thời: 1) độ trễ thời gian khởi động máy (hoặc nhân điểm đặt); 2) độ trễ thời gian theo dõi (chạy). Chúng có thể có khoảng thời gian cố định hoặc có thể điều chỉnh.
Tổng thời gian chạy: Bằng độ lớn của điện cộng với thời gian chạy cơ học.
Cảm biến:
Rung động tạm thời: Rung động tạm thời của hệ thống cơ học. Nó có thể bao gồm rung cưỡng bức hoặc tự do hoặc cả hai. Rung động thoáng qua thường liên quan đến những thay đổi trong điều kiện vận hành của máy như tốc độ, tải, v.v.
Thiết bị giám sát tuabin (TSI): Hệ thống TSI là hệ thống giám sát liên tục thường được sử dụng trên các bộ máy phát điện tuabin. Nó có thể bao gồm các phép đo như độ rung hướng tâm của trục, độ rung tuyệt đối của trục, vị trí lực đẩy dọc trục, độ giãn nở trường hợp chênh lệch, vị trí van, độ lệch tâm đỉnh-đỉnh, tốc độ không và RPM trục. Metrix hiện không cung cấp loại thiết bị đo này.
Mất cân bằng (Imbalance): Phân bố trọng lượng xuyên tâm không đều trên hệ thống rôto; một điều kiện trục mà đường tâm khối lượng (trục quán tính chính) không trùng với đường tâm hình học. Ngoài ra, lượng khối lượng gây ra sự mất cân bằng.
Vận tốc: Tốc độ thay đổi thời gian của độ dời. Vận tốc dẫn dịch chuyển 90 độ theo thời gian. Các đơn vị đo vận tốc là inch / giây hoặc milimét / giây, từ 0 đến đỉnh hoặc RMS. Các phép đo vận tốc thu được 1) bằng cách tích hợp điện tử của tín hiệu gia tốc từ cảm biến gia tốc hoặc 2) trực tiếp từ cảm biến vận tốc. Vận tốc là một phép đo được sử dụng rộng rãi để đánh giá vỏ máy và các đặc điểm phản ứng kết cấu khác.
Cảm biến vận tốc: Một cảm biến địa chấn chuyển chuyển động vận tốc thành tín hiệu điện tỷ lệ.
Bộ phát tốc độ: Bộ truyền vận tốc tạo ra tín hiệu 4-20mA tỷ lệ với vận tốc dọc trục.
Rung: Chuyển động sinh ra từ một kích thích. Các phép đo ngoài dung sai đối với rung động quá mức rất hữu ích để bảo vệ khỏi 1) thương tích cho con người; 2) thời gian chết máy móc tốn kém; 3) sửa chữa rộng rãi có thể tránh được; 4) tỷ lệ bảo hiểm cao hơn.
Phân tích rung động và thu thập dữ liệu: Quy trình liên quan đến việc thu thập, thao tác, hiển thị và cụ thể hơn là giải thích dạng sóng rung động của vỏ máy và / hoặc trục liên quan đến tình trạng máy. Ngoại trừ những máy lớn nhất, việc thu thập dữ liệu thường được thực hiện bằng cách đi vòng quanh những người vận hành đã được đào tạo thích hợp để thu thập các điểm đo theo lịch trình. Cảm biến tiệm cận hoặc cảm biến địa chấn được gắn cố định thuộc bộ phận giám sát “bảo vệ” chống rung quá mức được truy cập khi có thể, hoặc một gia tốc kế được gắn tạm thời để đo vỏ. Tùy thuộc vào bộ thu thập dữ liệu, dữ liệu có thể được hiển thị trên màn hình trên bo mạch hoặc được tải xuống, lưu trữ và sau đó được truy xuất để thao tác trên PC trước khi phân tích. Nguyên nhân gốc rễ của rung động cao hoặc ngày càng tăng được thực hiện bằng cách phân tích cả dạng sóng thời gian, phổ tần số (tức là biên độ ở tần số rời rạc) cho một trường hợp nhất định trong thông tin về thời gian và pha.
Máy đo độ rung: Một thiết bị di động một hoặc hai bộ phận (cảm biến từ xa) được sử dụng để đo biên độ rung động địa chấn (vỏ).
cảm biến phát độ rung: Một thiết bị kết hợp giữa cảm biến gia tốc địa chấn hoặc cảm biến rung của trình điều khiển đầu dò khoảng cách cùng với bộ điều hòa tín hiệu điện áp thành dòng điện để cung cấp đầu ra 4-20 mA tương ứng. Đầu ra này biểu thị độ rung của bảng tên từ 0 đến đầy đủ và cung cấp đầu vào cho PLC hoặc DCS của người dùng, trong đó (các) điểm đặt, (các) độ trễ thời gian và (các) kiểm tra tính toàn vẹn của đầu vào có thể được lập trình như một phần của chức năng màn hình.
Dạng sóng: Bản trình bày hoặc hiển thị biên độ tức thời của tín hiệu dưới dạng hàm thời gian. Một dạng sóng dao động có thể được xem trên máy hiện sóng ở chế độ cơ bản thời gian.
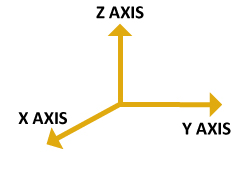
XY: Các trục vuông góc trong hệ tọa độ Descartes. Thường được sử dụng làm tham chiếu cho các cảm biến rung kép vuông góc lẫn nhau trực giao.
|
|
Giá trị Zero-to-Peak: Một nửa của giá trị từ đỉnh đến đỉnh.
Báo giá ngay – Hàng chính hãng – Bảo hành 12 tháng – Tư vấn hỗ trợ kỹ thuật 24/7